- 省エネ





- 業(yè)種?工程別
械向機(jī)器")


-
-




- 用途別





産業(yè)用ロボット向機(jī)器
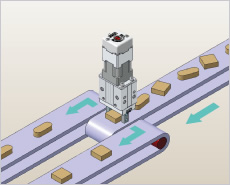
ハンドリングロボット ハンドリング
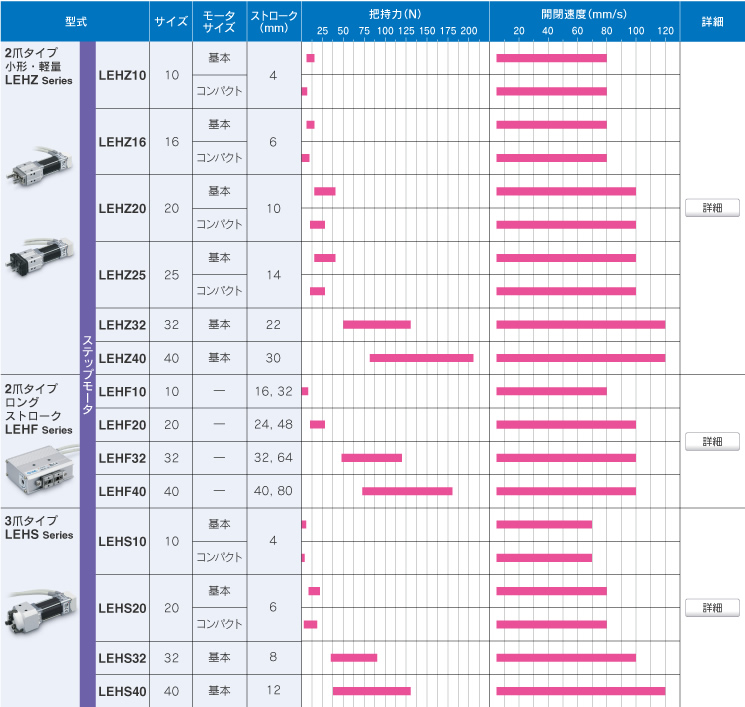
|電動(dòng)グリッパ
移載変形?破壊しやすい部品の把持
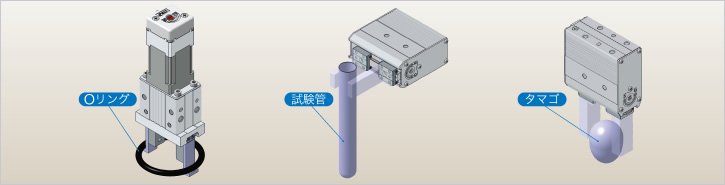
?速度制御
?把持力制御
?位置決め
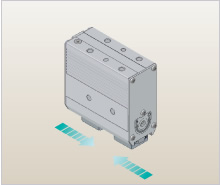
バラバラに並べられた部品の
整列?選別
?寸法の異なるワークの識(shí)別
狹い場(chǎng)所での把持
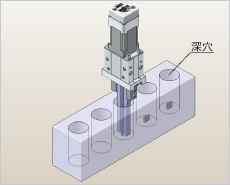
?位置決め
ソフトタッチ高頻度
?速度制御
?位置決め
(最小ストローク)