












產(chǎn)品情報(bào) ?
產(chǎn)品目錄
? 真空設(shè)備(真空發(fā)生器/真空吸盤/其他)
? 協(xié)作機(jī)械手臂用 真空夾取單元
協(xié)作機(jī)械手臂用 真空夾取單元
Magnet Gripper for Collaborative Robots MHM-X7400A
for Universal Robots

-
?Plug and Play configuration for immediate use
?URCap: Easy programming
?Attracts and holds heavy objects with a magnet
?Supports workpieces with holes and uneven surfaces
?Compact with high holding force
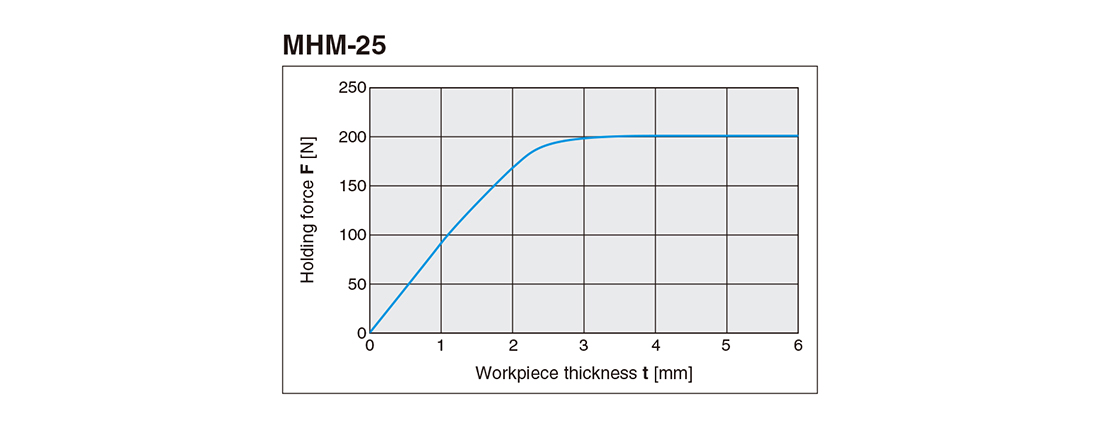
Holding force: Max. 200 N (?25, Workpiece thickness 6 mm)
?Continues to hold workpieces even when the air is shut off
?Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
?Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
| Series | Max. holding force N (Workpiece thickness mm) |
|---|---|
| MHM-X7400A | 160(2) 200(6) |
產(chǎn)品特點(diǎn)
Magnet Gripper for Collaborative Robots

Attracts and holds heavy objects with a magnet
Supports workpieces with holes and uneven surfaces
Compact with high holding force: Max. 200 N (o25, Workpiece thickness 6 mm)
Continues to hold workpieces even when the air is shut off
Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
URCap
Component Parts

Characteristics
Holding force
The holding force graph shows the theoretical value for low-carbon steel plates.
Holding forces vary depending on the material and shape of the workpiece. Please perform a holding test while referring to the value selected based on the graph.
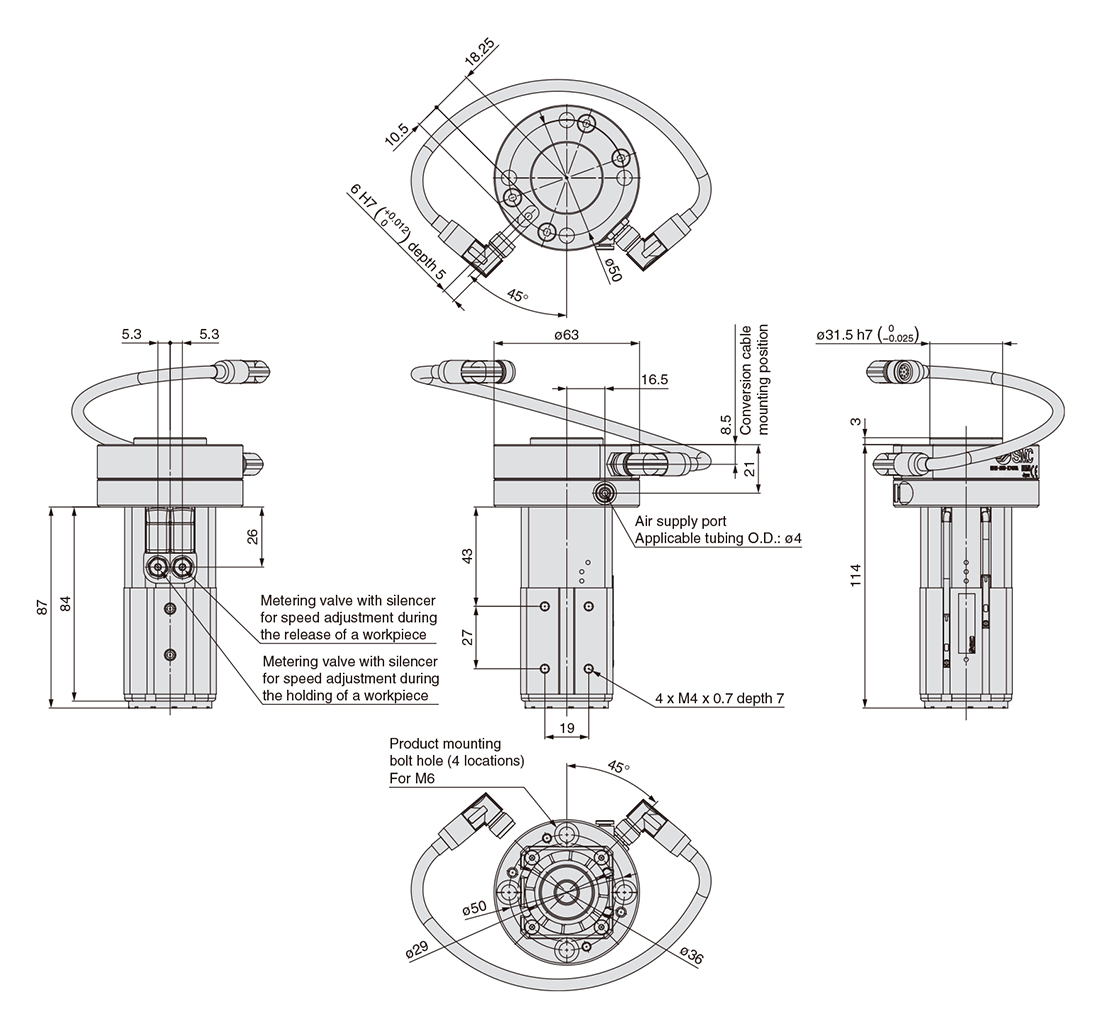
Dimensions
URCap
Easy programming
By using the dedicated software certified for Universal Robots, URCap, the teaching pendant can conduct various operations intuitively, allowing for sensor signals to be easily incorporated.
Save a copy of the URCap software to a USB memory and insert it into the teaching pendant to easily install the software.
? Please download the URCap software from the website, and save it to a USB memory.


