












產(chǎn)品情報 ? 旋轉(zhuǎn)缸/氣壓夾爪
? 協(xié)作式機器人用氣壓夾爪
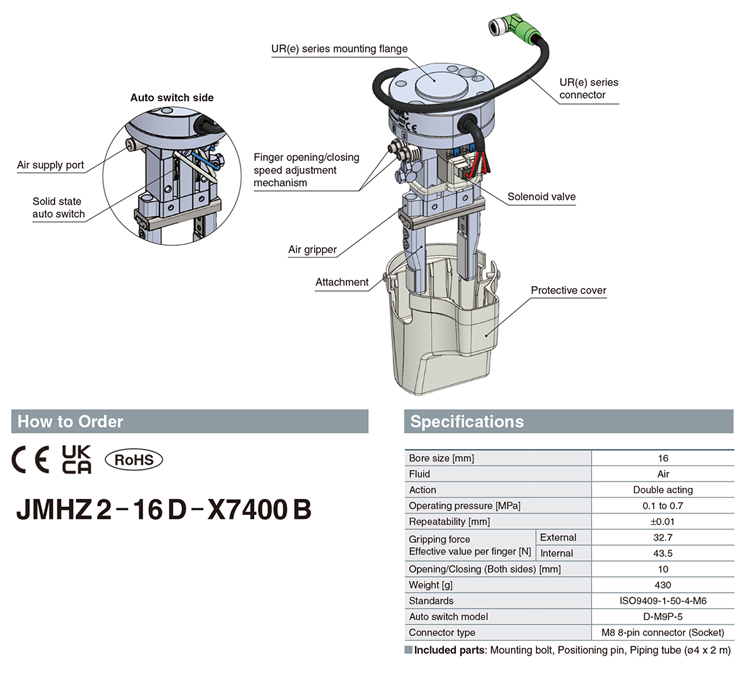
協(xié)作式機器人用氣壓夾爪
Air Gripper Unit for Collaborative Robots JMHZ2-X7400B
for Universal Robots

-
?Plug & play configuration for immediate use
URCap compatible, Easy programming
?Compact, lightweight product with high gripping force due to air operation
Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
?Integrated solenoid valve and speed adjustment mechanism
?Standards: ISO9409-1-50-4-M6
| Type | Series | Cylinder bore size (mm) |
|---|---|---|
| For Collaborative Robots | JMHZ2-16D-X7400B | 16 |
產(chǎn)品特點
Air Gripper Unit for Collaborative Robots

Compact, lightweight product with high gripping force due to air operation
High rigidity and high precision due to its guide-integrated construction
Repeatability: ±0.01 mm due to the adoption of a high-precision linear guide
Higher rigidity due to the adoption of a linear guide of the higher rigidity and precision (Compared with the same size of the existing MHZ2)
Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
Integrated solenoid valve, speed adjustment mechanism, and auto switch
URCap/h4>
Component Parts
Characteristics

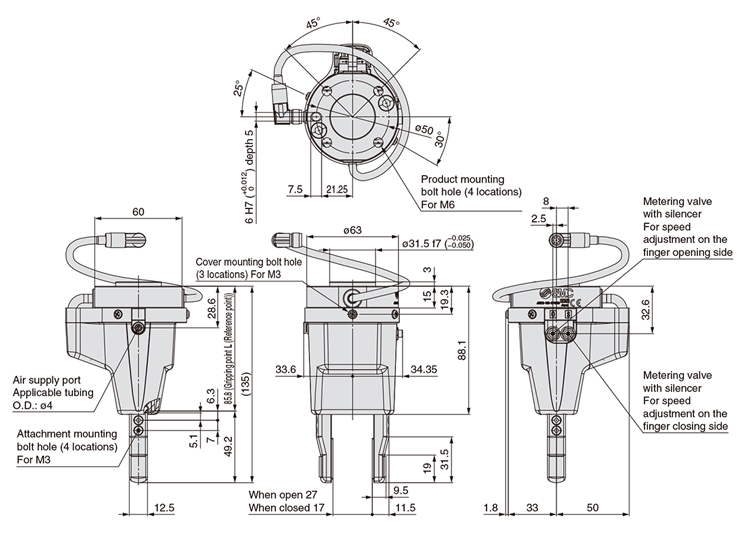
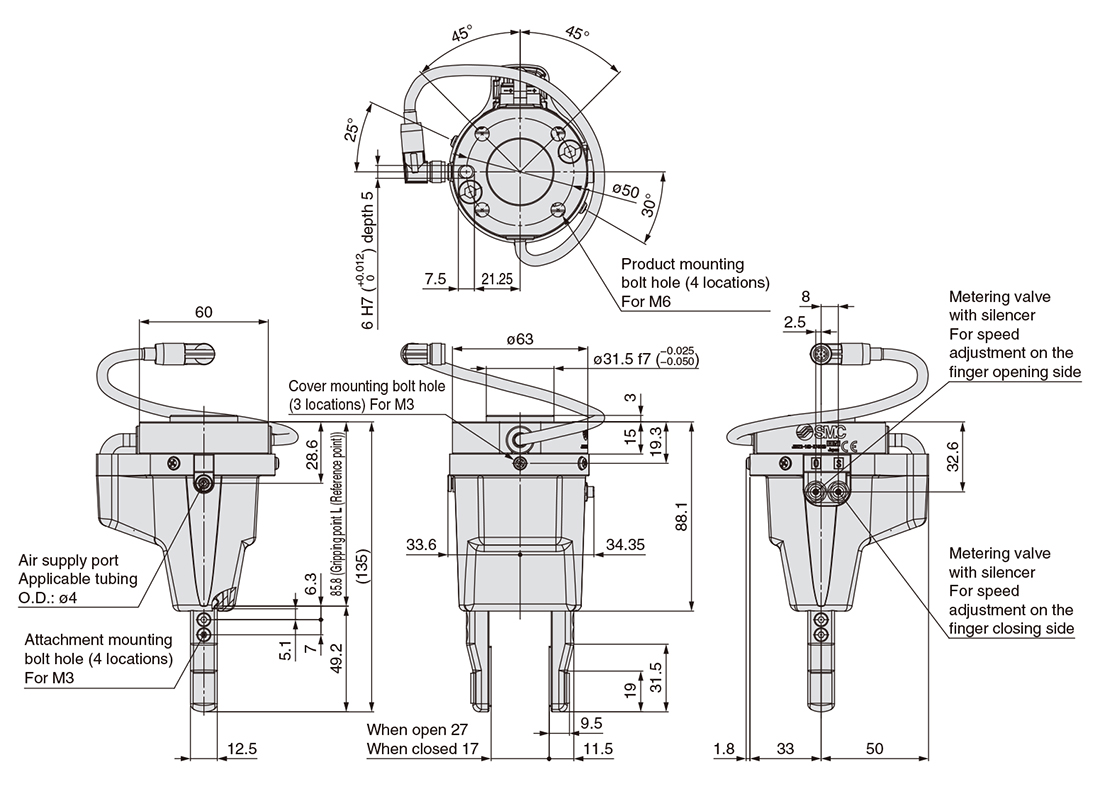
Dimensions
URCap compatible


Easy programming
By using the dedicated software certified for Universal Robots, URCap, the teaching pendant can conduct various operations intuitively, allowing for sensor signals to be easily incorporated.
* Please download the URCap software from the website, and save it to a USB memory.
Save a copy of the URCap software to a USB memory and insert it into the teaching pendant to easily install the software.


